סימולציה בחוג סגור
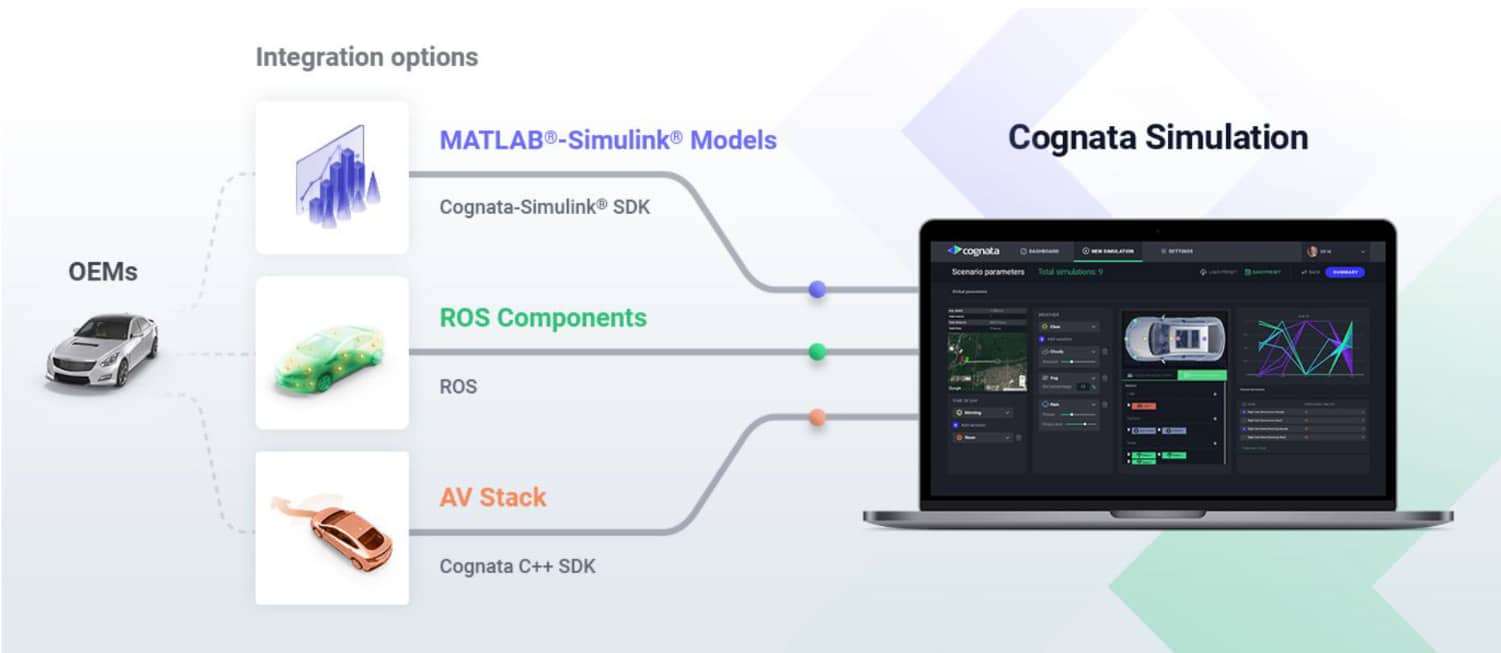
בצעו סימולציה מקיפה בחוג סגור עם ממשקי
MATLAB® Simulink® ומרכיבי ה-ROS שלכם
בהתממשקות פשוטה עם סטודיו קוגנטה.
Simulink®
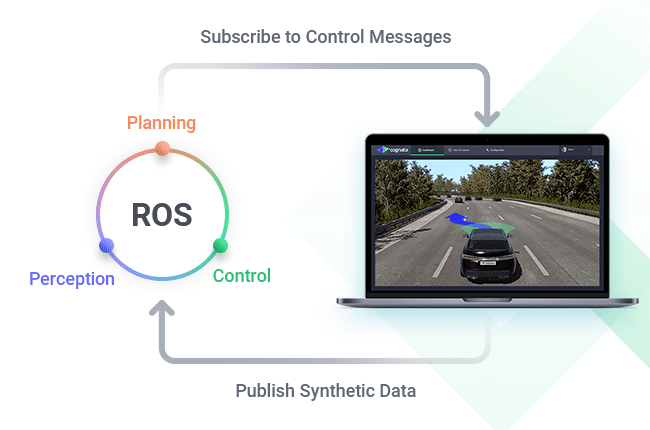
Robotic Operating System
ערכת פיתוח (SDK) של קוגנטה
התחברו במהירות לסימולציה בחוג סגור של קוגנטה עם ממשקים מוגדרים מראש
![]() אינטגרציית מערכות בטיחות מתקדמות (ADAS) ופיתוח מערכי בקרה
אינטגרציית מערכות בטיחות מתקדמות (ADAS) ופיתוח מערכי בקרה
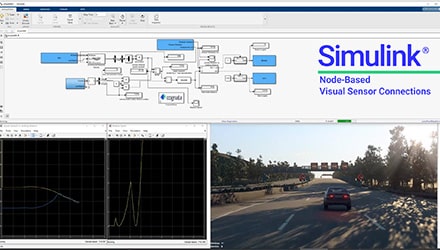
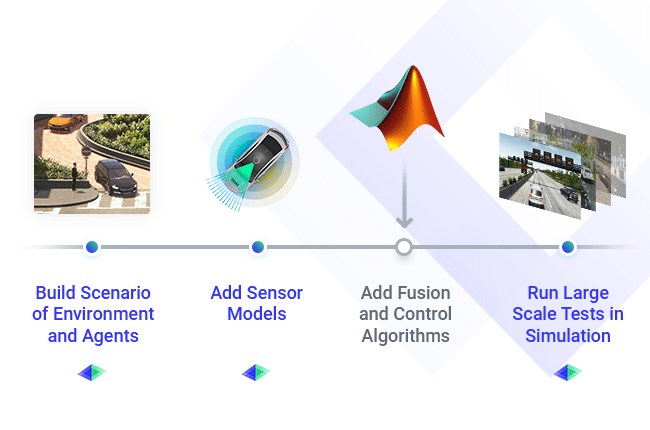
בעזרת אינטגרציית MATLAB® Simulink® שלנו, קל ופשוט למפתחים לבנות ולבחון אלגוריתמים של תכנון ובקרה בסימולציה במעגל סגור עם סטודיו קוגנטה.
בעת ביצוע מבחן סימולציה מוגדר מראש עבור מערכות מתקדמות לסיוע לנהג (ADAS), קוגנטה מספקת חיבור בחוג סגור בין מודלי הרדאר, לידאר (LiDAR), מצלמה ו-GPS המתקדמים שלה, מערך יצירת התרחישים בסטודיו של קוגנטה, וממשק התקשורת עם Simulink® לצורך אינטגרציה ובקרה.
![]() בדיקות רכב אוטונומי
בדיקות רכב אוטונומי
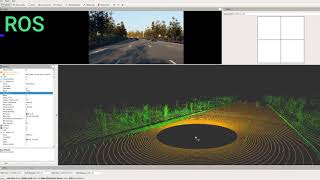
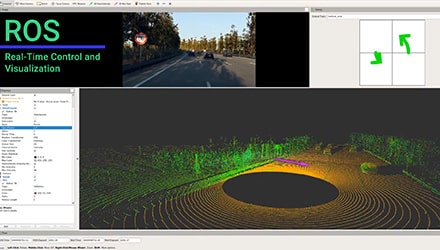
בצעו הערכה של כל המרכיבים ברכב האוטונומי שלכם, החל מיכולות החישה ובקרה באמצעות יצירת מידע סינתטי מחיישנים שונים, הפעלת מערכות באמצעות (ROS) ועד עיבוד מידע עצמאי על ידי בינת הרכב האוטונומי (AI).
היישומים משתנים – החל מאיתור אובייקטים ועד תכנון תנועה, ניתן לשימוש במגוון מערכות תוכנה לרכב אוטונומי ובעבודה עם ממשקים מוכרים כדוגמת ROS ו Simulink או בעבודה ישירה מול ממשק הSDK של קוגנטה