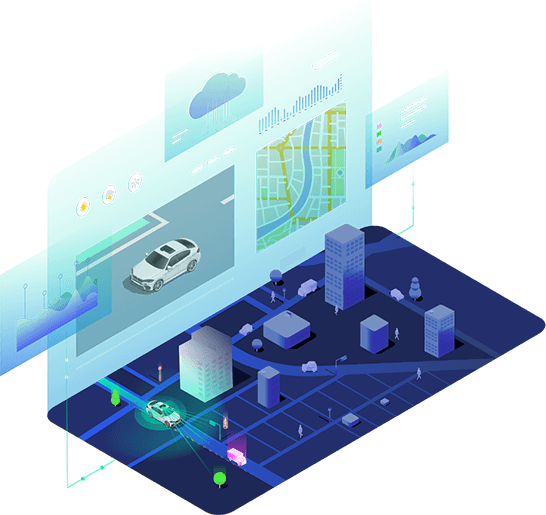
פלטפורמת סימולציה
פלטפורמת הסימולציה שלנו תוכננה עבור רכבים אוטונומיים ומערכות בטיחות לרכב ומאיצה את זמני הפיתוח של המערכות על ידי תמיכה מקיפה במגוון שלבים: אימון, תיקוף ואימות.
אימון בינה מלאכותית
מרכיבים עיקריים

סביבה תלת מימדית ברמה של תאום
- סביבות תלת מימד עשירות לנהיגת רכבים אוטונומיים
- תאומים דיגיטליים ועולמות סינתטיים לחלוטין עבור בדיקה ואימות של רכבים אוטונומיים
- נתונים סינתטיים פוטו-ריאליסטיים המתאפשרים על ידי רשתות נוירונים מיוחדות (DDN, deep neural networks)
דאטה-סטס סינתטיים
- יצירת דאטה-סטס סינתטיים בקנה מידה נרחב לאימון ובדיקה של מערכות למידת מכונה (ML) באמצעות בינה מלאכותית
- אנוטציה עקבית ומדויקת בכל פריים
- התאמה אישית על פי בקשה
מודל תנועה נאמן למציאות
- נהגים, רוכבי אופניים והולכי רגל נאמנים למציאות
- מערכת בינה מלאכותית עם פרופילים להתנהגות אינטראקטיבית מוטת מיקום
- יכולת שליטה מדויקת פריסה בקנה מידה נרחב
אימות ותיקוף
מרכיבים עיקריים
תרחישי מערכות נהיגה אוטונומיות מוכנים לשימוש
- ספריה של תרחישים עבור מערכות בטיחות לרכב (ADAS) ורכבים אוטונומיים בנויים מראש עבור תפקודי נהיגה נפוצים
- תאימות למערכות בטיחות לרכב ורכבים אוטונומיים נפוצות בשוק
- יכולת מובנית ליצירה מהירה של וריאציות חדשות עבור תרחישים המשמשים לרגולציה והסמכה
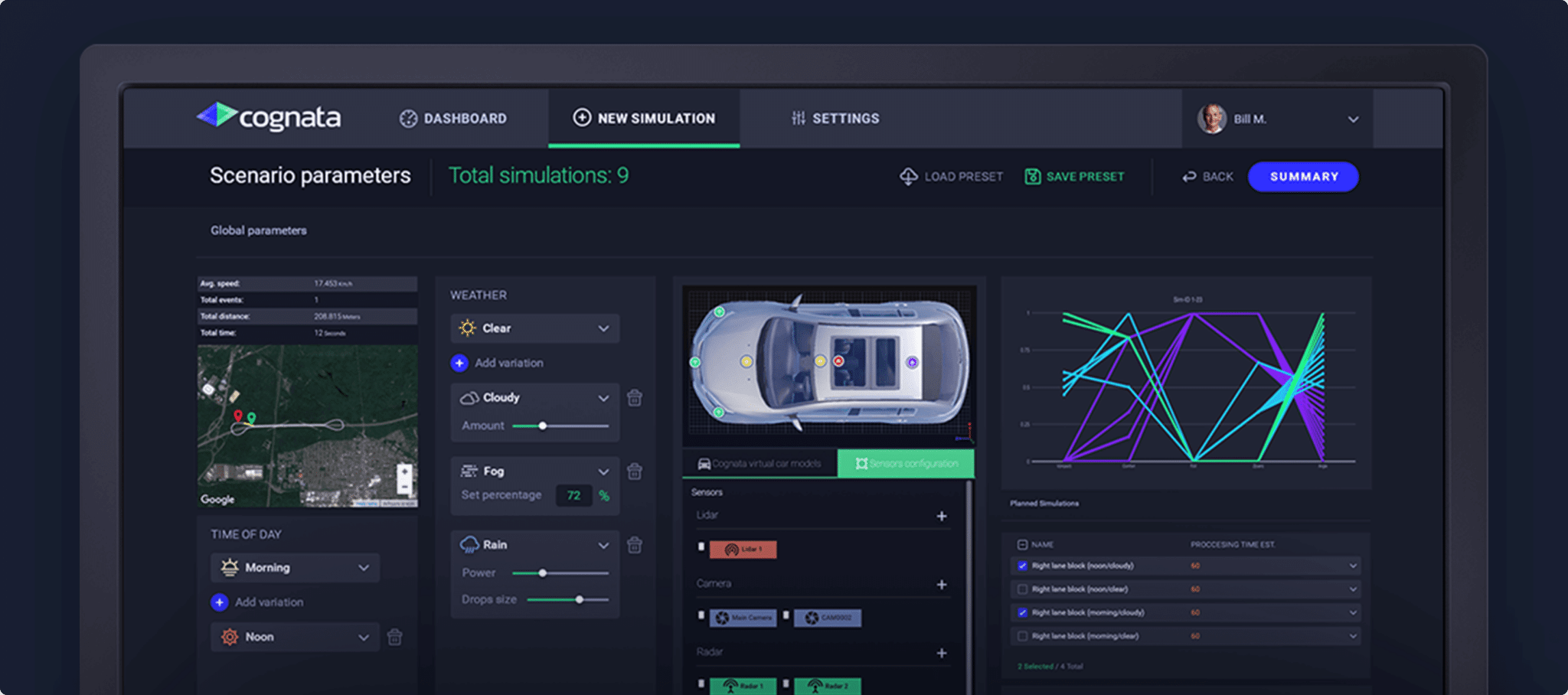
יצירת וניהול תרחישים
- יצירה, הגדרה וניהול של תרחישים בקלות ובנוחות
- ממשק גרפי ידידתי למשתמש
- שליטה מלאה ביצירה וניהול תרחישים באמצעות שפת הקוד Python
אינטגרציה פשוטה למערכות קיימות
- סימולציה במעגל סגור תוך שימוש בפרוטוקולים סטנדרטיים
- בדיקה אוטומטית עם ג’נקינס (Jenkins) ובמבו (Bamboo)
- אינטגרציה מובנית עם מערכות ניהול מחזור חיי מוצר (PLM)
ניתוח נתונים
מרכיבים עיקריים

הפקת תובנות
- קריטריונים מוכנים לשימוש של עובר/נכשל עבור אימות והסמכה של מערכות נהיגה אוטונומיות (AV ו-ADAS)
- יכולת הגדרת קריטריונים אישיים
- ניתוח והסקת מסקנות בקנה מידה נרחב
כלי ויז׳ואליזציה
- ייצוג מידע מונחה מטרה
- לוחות בקרה מותאמים מרובי שכבות
- מערכת תומכת החלטות
פריסה
- מערכת תומכת ניהול שלבי התיקוף לקראת מוכנות טכנולוגית
- תמיכה בתקנים של מערכות אוטונומיות (AV ו-ADAS) בהתאם לדרישות המחוקק
- תמיכה מתמשכת להתרחבות גיאוגרפית
סימולציית רכבים אוטונומיים: אופן הפעולה
שכבה סטטית – תאום דיגיטלי
עולמות וירטואליים לבדיקות רכבים אוטונומיים
שכבות בנויות-פרוצדורלית של סביבות תלת מימד של דרכים, מבנים ותשתיות הבנויות ברמת דיוק גבוהה עד לסימון הכביש, חומרי פני השטח ואורות.
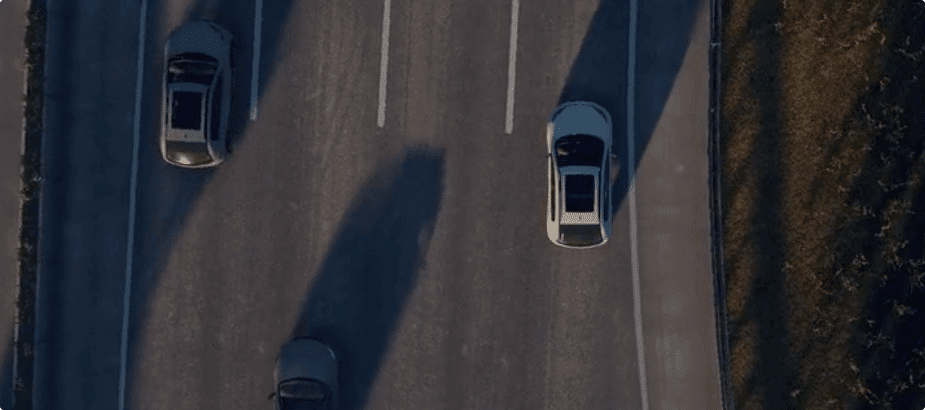
שכבה דינמית - רכבים והולכי רגל
מודלים סטטיסטיים חכמים המאפשרים תכנון נתיב ולמידת חוקי תנועה
נהגים, הולכי רגל ורוכבי אופניים מונחי בינה מלאכותית אשר מחקים בצורה מדויקת התנהגויות האופייניות לאזור המדומה.
שכבת חישה
סימולציה מדויקת של חיישנים
תמיכה במידול של מצלמות (VIS), מידול מגוון רחב של חיישנים הכולל רדאר, לידאר (LiDAR) ותרמי, בשיטות מתקדמות הכוללות שימוש ברשתות נוירונים (DNN) ומידול פוטו-ריאליסטי.

שכבת ענן
הרצת תרחישים מרובים על גבי ענן אלסטי
יכולת הרצת תרחישים בקנה מידה גדול, יעיל כלכלית, לכיסוי אלפי סצנות והגעה מהירה יותר לתוצאות.