- ProductsIndustries
- IndustriesIndustries
- COMPANYIndustries
- NEWSROOMIndustries
- CAREERSIndustries
Menu
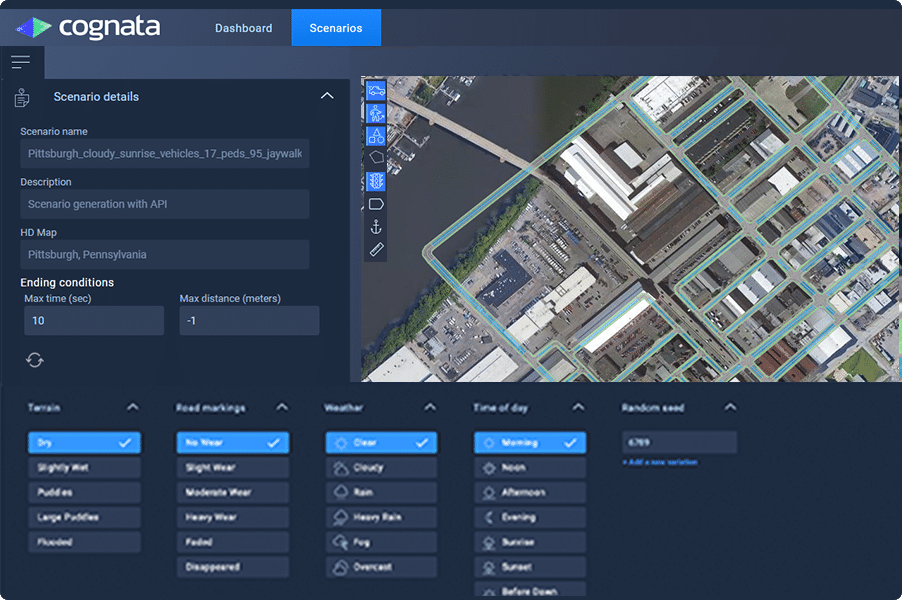
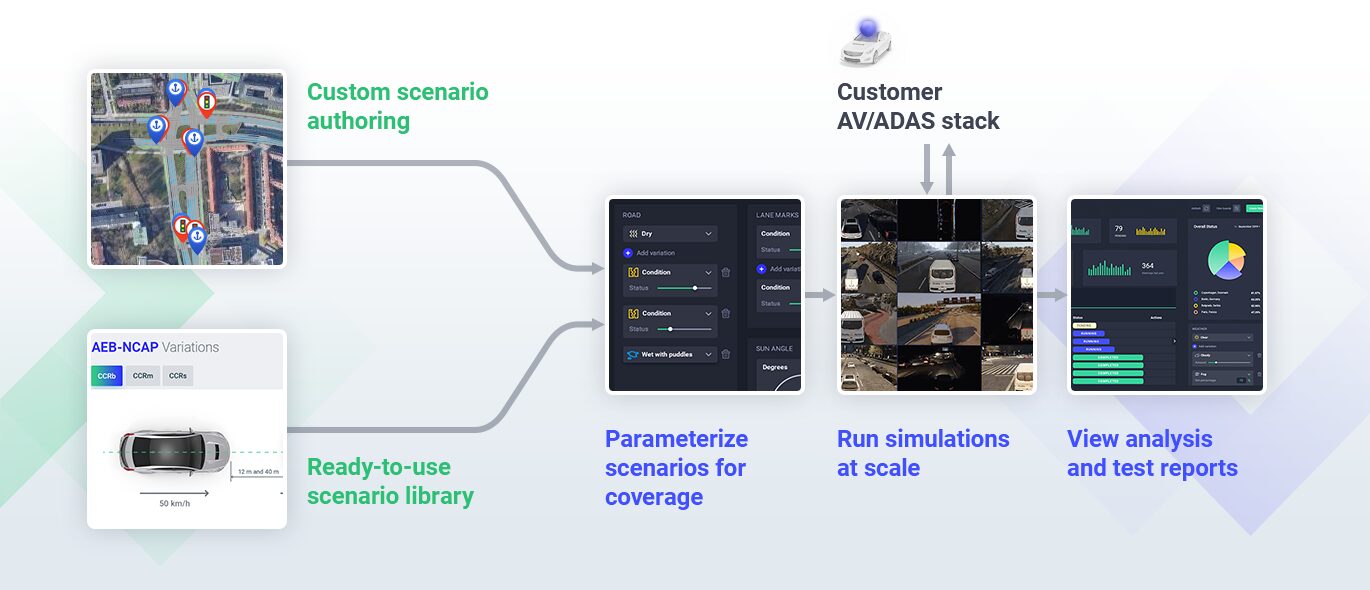
Cognata’s scalable elastic cloud capacity simplifies large-scale scenario generation. Get started right away with our libraries of common standard scenarios or create your own with the Cognata Studio UI and ASAM OpenSCENARIO® scripting capabilities.
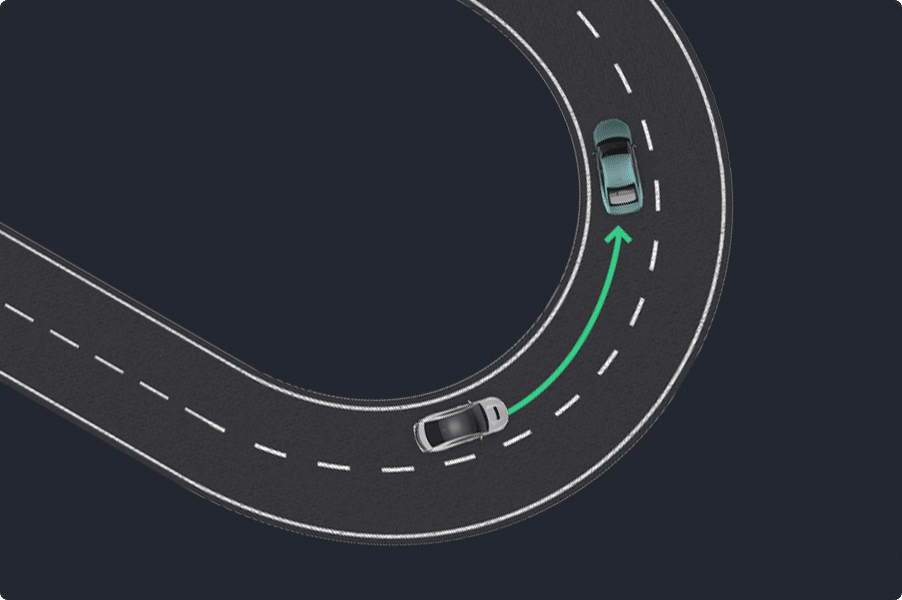
Highway: Lane Centring in a Turn
With Cognata’s car physics, it is noticeable that under different Ego vehicle speed, the vehicle friction with the asphalt surface varies and reacts accordingly.
In this Side-by-Side view of the same scenario, in a highway environment, we can witness the Ego car trying to maintain its lane centring position in a sharp turn, succeeding in one-speed parameter vs. failing the criteria in the other.
Parking Lot: AEB with Crossing Pedestrian and Near Lane Vehicle
With Cognata’s advanced perception training, decision-making is affecting the end result of the scenario.
In this side-by-Side view of the same scenario, a 1-second difference in the breaking decision changes the outcome.
In this parking lot scenario, we can see the Ego car colliding with the near lane vehicle, failing the pre-set success criteria of a safety zone.