- ProductsIndustries
- IndustriesIndustries
- COMPANYIndustries
- NEWSROOMIndustries
- CAREERSIndustries
Menu
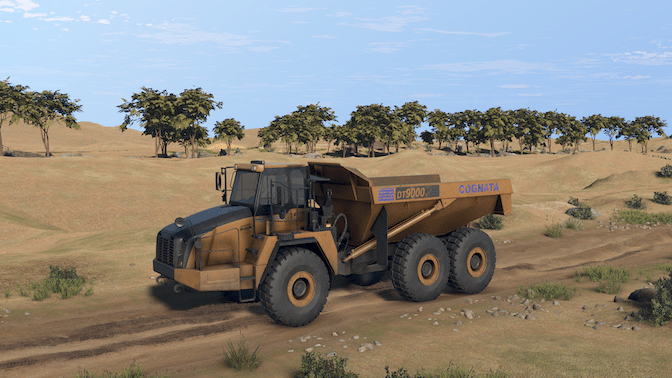
Cognata’s AV off-road simulation is designed to test,
train and validate perception and control challenges
for terrains that do not offer a clear road definition
and for paths that offer challenging conditions such
as boulders, side slopes, difficult tractions, and more.