我们的仿真平台已实现商业化部署,该平
台贯穿整个自动驾驶系统研发迭代的全流
程,从训练、测试到部署,加快自动驾驶
系统的上市时间。
训练环境

功能验证
分析

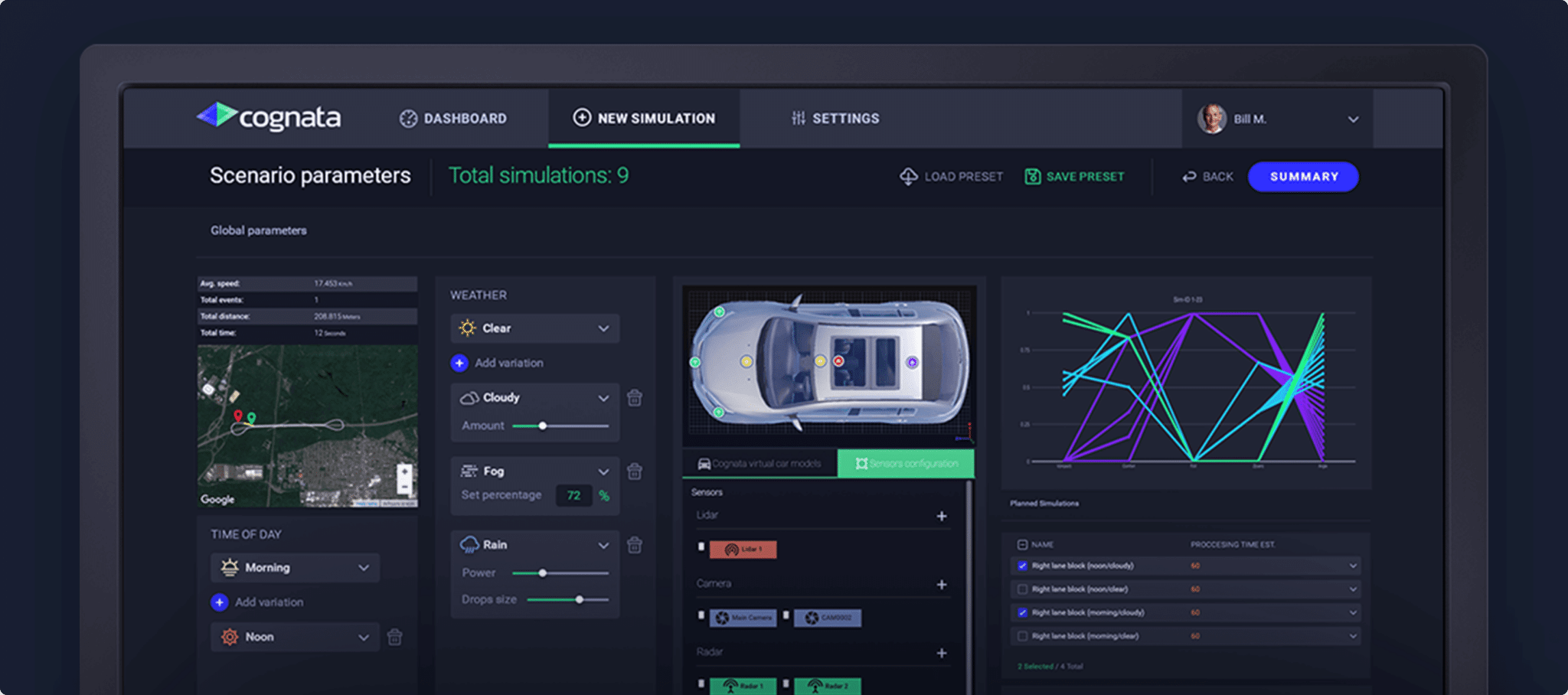
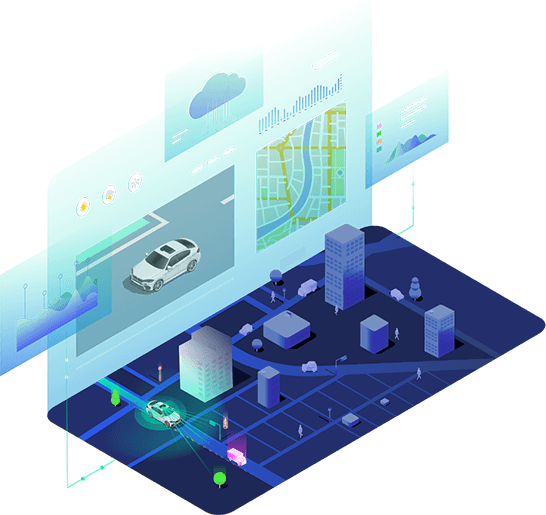
程序构建的道路、建筑物和基础设施的3D环境将精确到每一个车道标记、表面材质和红绿灯。
基于人工智能的交通模型能够准确还原仿真区域的司机、行人和骑行者的行为习惯。
支持常用的摄像头和激光雷达,并支持基于深度神经网络的雷达传感器模型,同时提供了一套工具链来实现传感器的快速创建。

支持大规模重建,可覆盖海量驾驶场景,加快仿真运行速度,大大降低仿真成本。