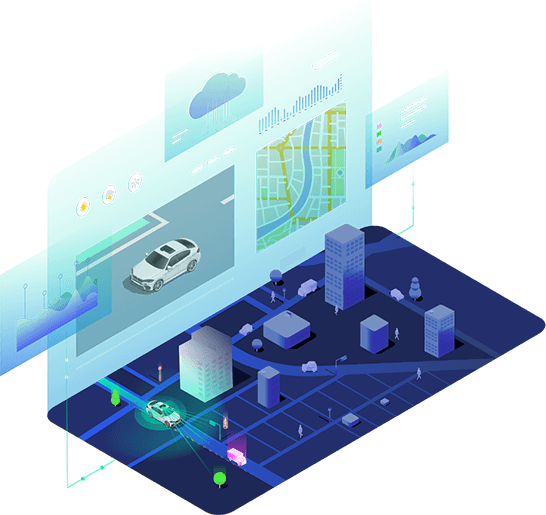
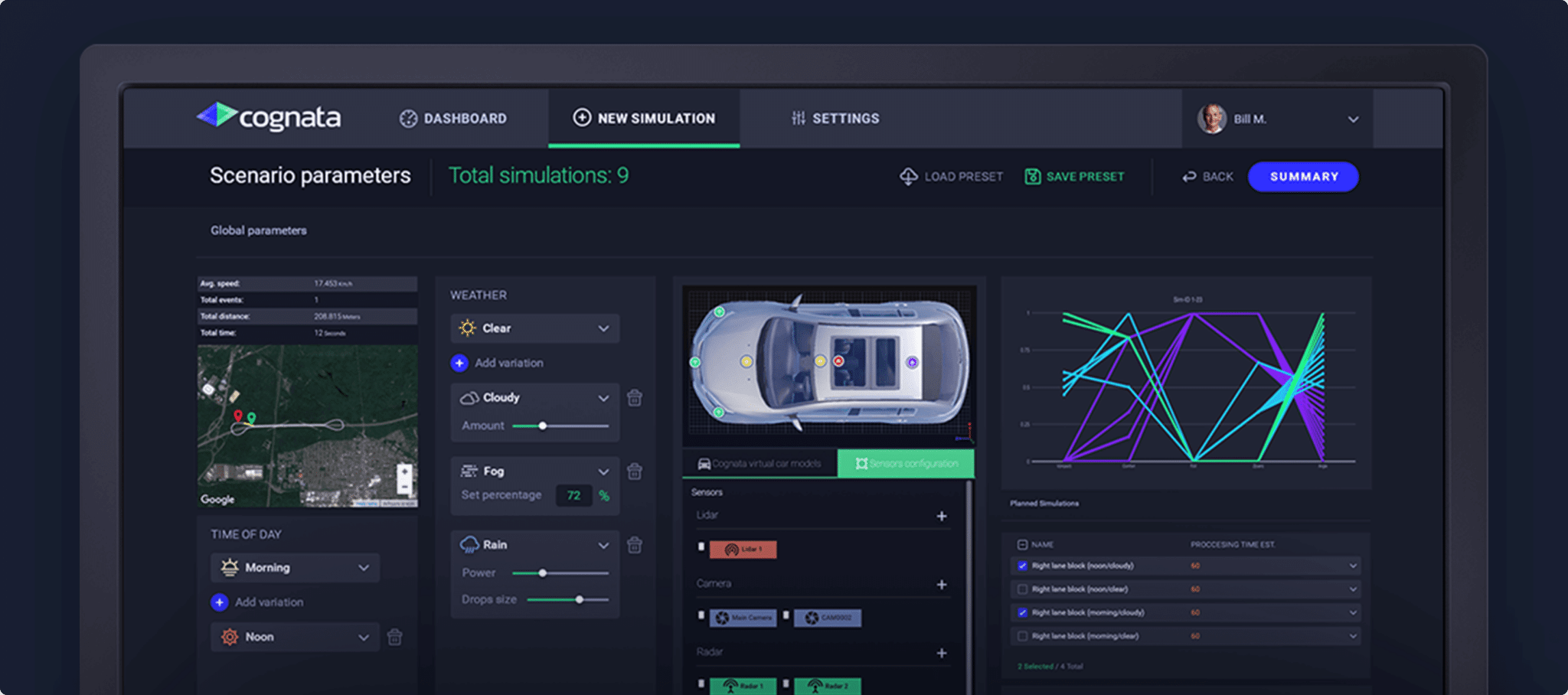
当社プラットフォームは、トレーニング ー テスト ー デプロイまでの開発プロセス全体をサポートしており、自動運転システムの市場投入に必要な時間を短縮できます。
トレーニング

検証機能
分析

道路、建物、インフラ設備を手順に沿って3D環境に構築。道路のレーンマークや表面の材質、信号機にいたるまで正確に再現。
地域の特色に合わせて行動をシミュレートした、AIのドライバー、自転車、歩行者。
ディープ ニューラル ネットワークでビルドされた、一般的なカメラ、LiDAR、レーダー センサー モデルを準備。新しいセンサーをすばやく搭載できるツール も提供。

膨大な数のシナリオ環境をコストパフォーマンスを維持しながら、より早く結果を提供