使用您的MATLAB®Simulink®模型、
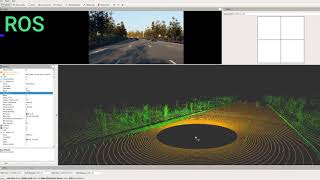
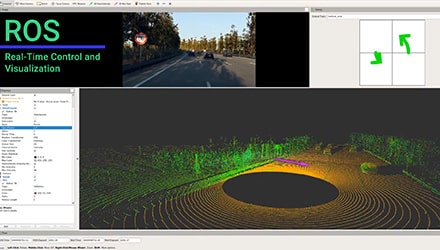
ROS组件或在回路中使用Cognata专有的AV软件堆栈执行全闭环仿真,包括HIL硬件在环仿真、SIL软件在环仿真和MIL人在回路仿真。
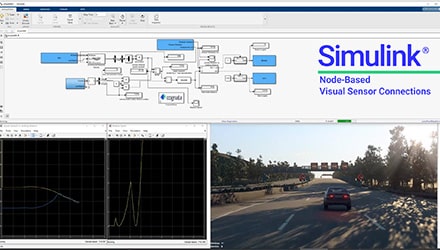
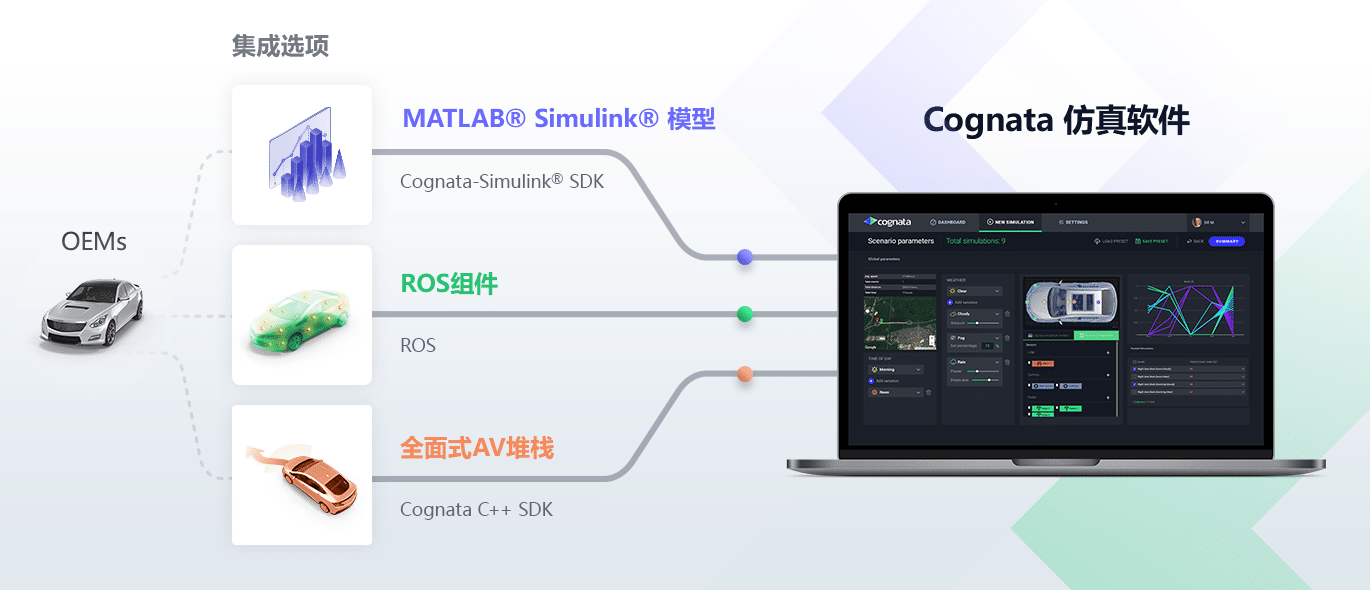
我们的MATLAB®Simulink®集成软件,能够使开发人员轻松地使用Cognata的闭环仿真系统构建和测试融合和控制算法。
Cognata提供了先进雷达、激光雷达、摄像头和GPS传感器模型之间的闭环连接,在Cognata Studio进行场景创作,以及在测试执行期间与Simulink®进行通信的接口,用于ADAS融合和控制的场景驱动式闭环仿真测试。

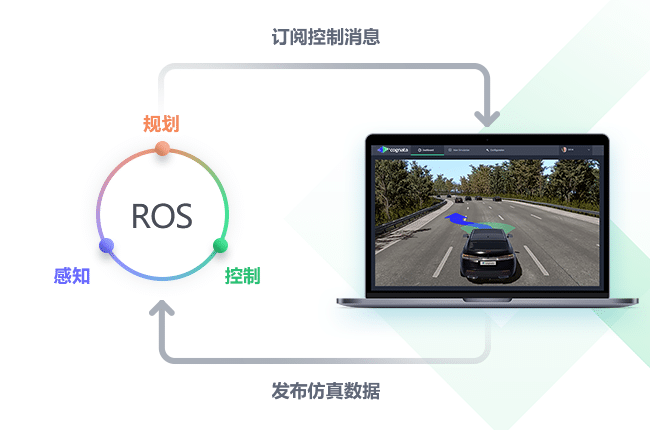
在单一集成中评估从感知到控制的所有要素。通过将来自Cognata仿真传感器的仿真数据发布到ROS以供AV堆栈处理,并返回Cognata订阅的控制消息,
从对象检测到来自专有式AV堆栈的运动规划,Apollo,Autoware和其他类的应用程序可以在单一闭环环境中,以虚拟方式一起执行。