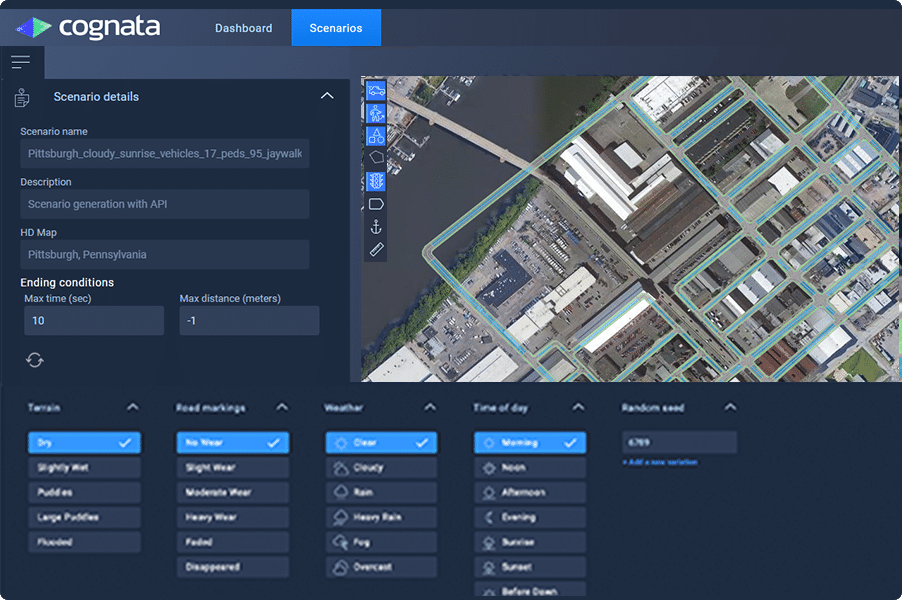
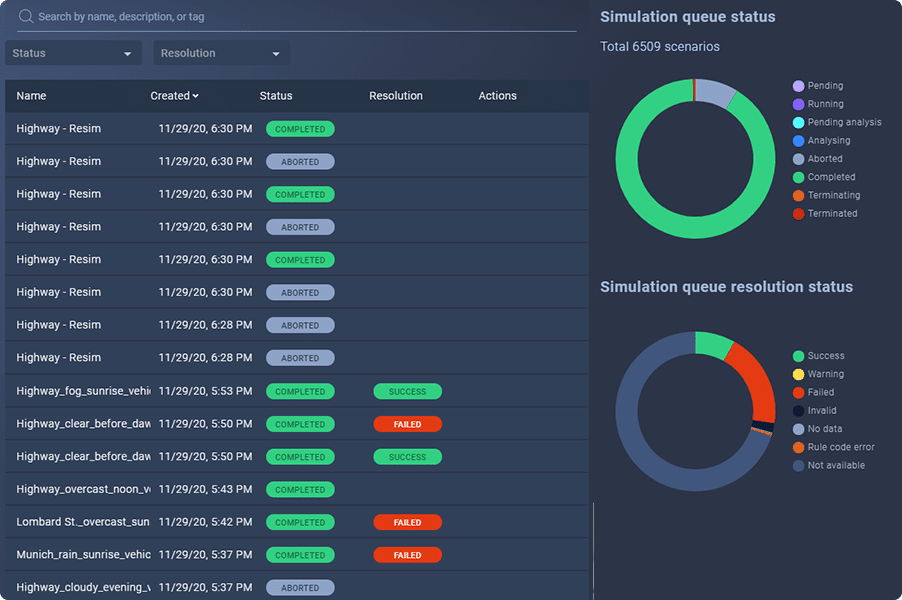
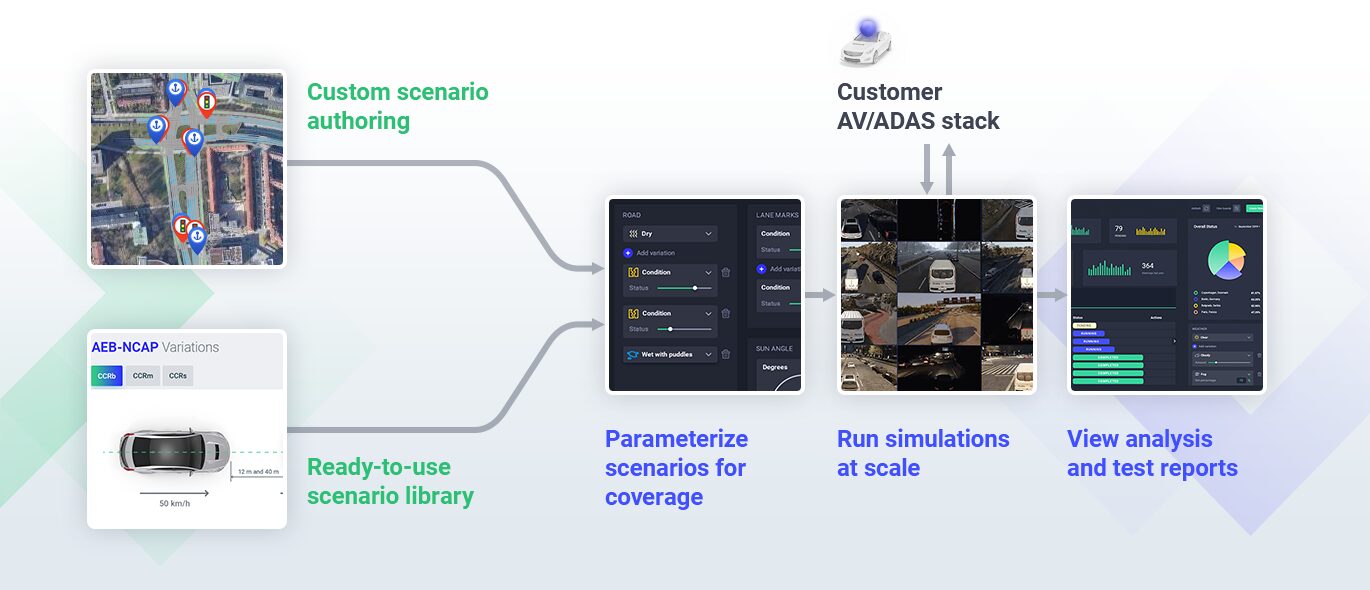
Cognata 的可扩展式弹性云计算能力大大简化了大规模场景的生成。
立即开始使用我们的通用型标准场景库,或者使用Cognata Studio
UI和ASAM OpenSCENARIO® 脚本功能创建自定义式的场景。
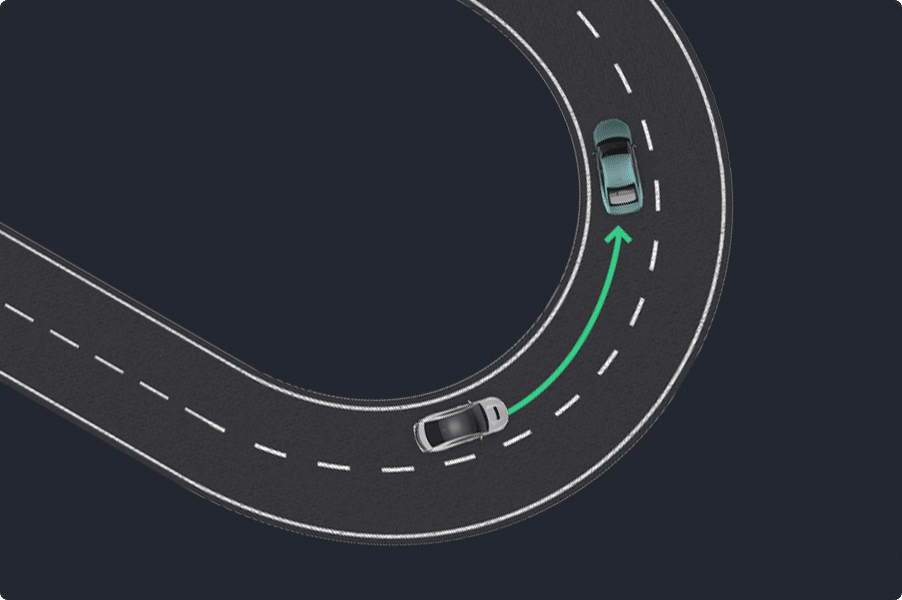
公路环境:转弯时的车道居中
基于Cognata汽车的物理特性,
我们可以看出在不同的自车
(ego-vehicle)车速下,
车辆与沥青路面的摩擦会发生变化,
并作出不同表现。
在该同一场景的, 公路环境中(并排视图),
我们可以看到自车(ego-vehicle)
试图在急转弯时保持其车道居中位置。
它在一个给定速度上获得成功,
却在另一个给定速度最终失败。
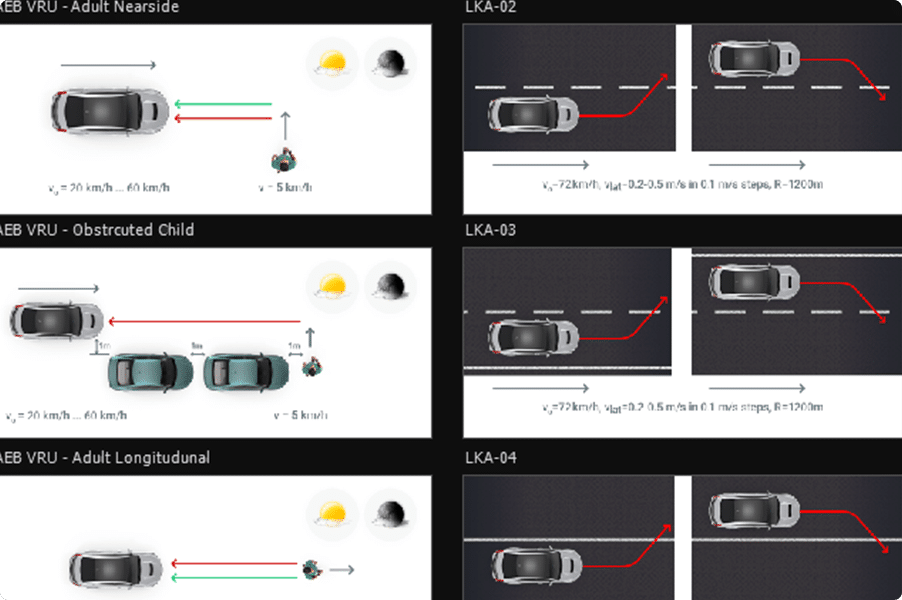
停车场:在有过路行人和近车道车辆时的自动刹车辅助系统(AEB)启用
通过Cognata的高级感知训练,
车辆做出的决策时刻影响着场景的最终结果。
在该同一场景的并排视图中,
中止先前决策的1秒差异就能改变最终结果。
在这个停车场的场景中,
我们可以看到自我意识车辆(ego-vehicle)
与近车道车辆相撞,
且未能达到预先设定的安全区域的成功标准。