Cognata의 AV 오프로드 시뮬레이션은 도로가 명확히 정의되지 않는 지형에 대한 인지 및 제어 과제를 테스트, 학습, 검증하도록 설계되었습니다.
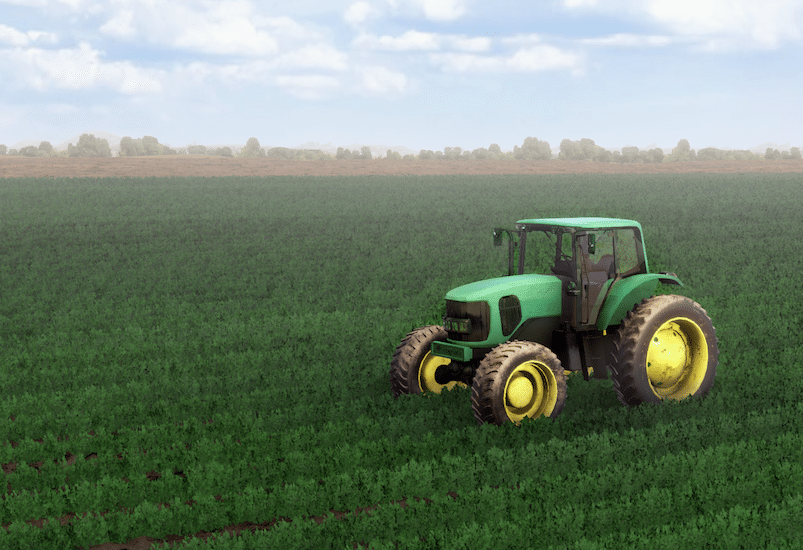
이 시뮬레이션 플랫폼은 농업용 로봇과 자동화 장비를 트레이닝하고 검증함에 있어 합성 데이터와 디지털 트윈 환경을 함께 사용하여 한 차원 높은 현실성을 제공합니다.
농업용 자동화 로보틱스 장비에는 인지, 분할, 국소화, 추적을 위해 고도의 머신 비전이 요구됩니다. AI 프로그래밍은 응용 분야마다 차이가 있으므로, 모든 농업 분야의 개발을 지원하는 플랫폼이 필요합니다. 식물이 생장하고 움직임이 많은 환경과 은폐된 장애물이 지형에 변화를 주기 때문에 차량 물리를 정확히 정의해야 합니다.

Cognata의 플랫폼은 독특한 여러 문제점을 포괄적으로 해결합니다:
Cognata는 주행 가능 경로 식별부터 장애물 및 까다로운 도로 상태 극복에 이르기까지 오프로드 주행을 학습하고 검증할 수 있도록 포괄적으로 주행이 가능한 3D 환경을 만들었습니다.
뿐만 아니라 특수한 농업용 트래픽 에이전트를 포함하는 풍부한 애셋 카탈로그를 제공하고, 고객의 고유한 3D 애셋을 가져올 수 있도록 지원하여 고객의 사용 사례를 완벽하게 구현해 드립니다.
