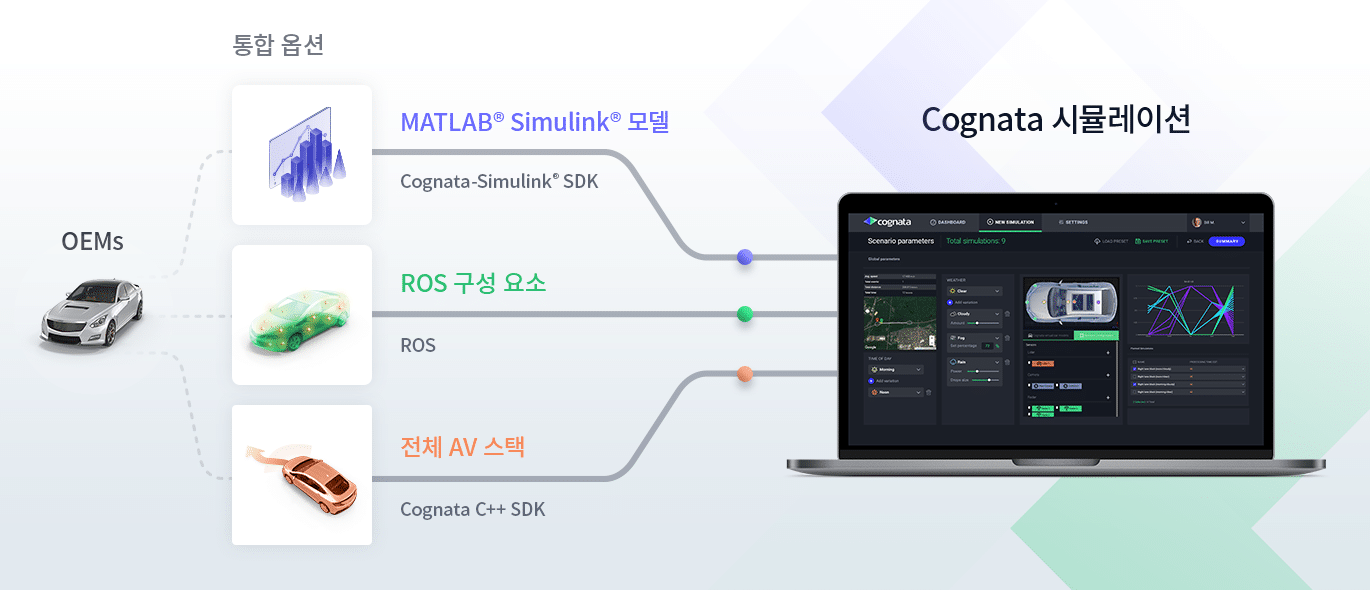
Cognata의 루프에서 MATLAB® Simulink® 모델,
ROS 구성 요소 또는 전용 AV 소프트웨
어 스택으로 전체 폐루프 시뮬레이션 실행
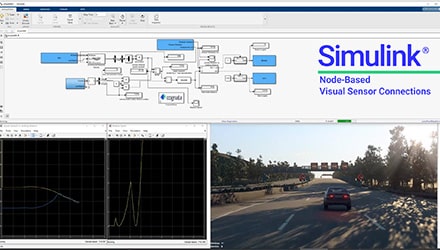
MATLAB® Simulink® 통합을 사용하면 개발자가 Cognata의 폐루프 시뮬레이션에서 퓨전 및 제어 알고리즘을 손쉽게 구축하고 테스트할 수 있습니다.
Cognata는 ADAS 퓨전 및 제어 시나리오에 기반한 폐루프 시뮬레이션 테스트 실행 중에 첨단 레이더, LiDAR, 카메라 및 GPS 센서 모델, Cognata Studio 저작 시나리오와 Simulink®의 커뮤니케이션 인터페이스 간을 폐루프 방식으로 연결합니다.

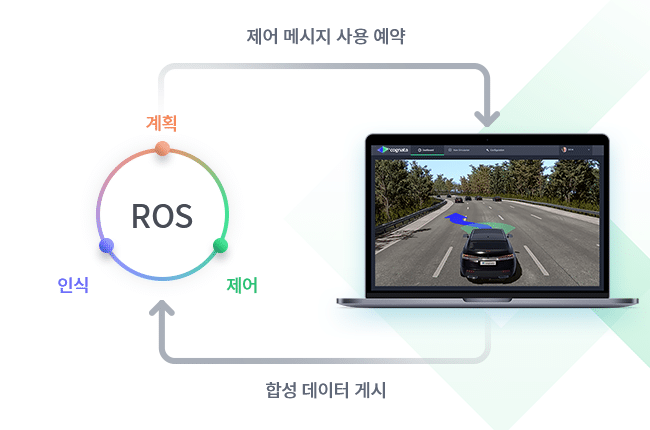
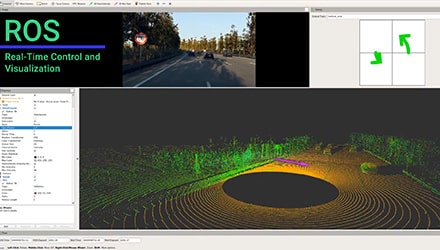
하나의 통합 솔루션으로 인식에서 제어까지 모든 것을 평가합니다. AV 스택에서의 처리와 Cognata에서 사용 예약한 제어 메시지를 반환하기 위해 Cognata 시뮬레이션 센서에서 ROS로 전달되는 합성 데이터를.
게시함으로써, 객체 감지부터 전용 AV 스택, Apollo, Autoware 등의 모션 계획에 이르는 애플리케이션을 단일 폐루프 환경에서 가상으로 모두 함께 실행할 수 있습니다.