CognataのオフロードAVシミュレーションでは、整備されていない道路の地形の検知や制御のテスト・トレーニング・検証が可能です。
それにより、デジタルツイン環境で合成データを使用し、農業用ロボットと自動化した機械のトレーニングと検証において新しいレベルのリアリズムを実現します。
農業用自動ロボットは、認識、セグメンテーション、ローカリゼーション、および追跡を行うために、従来より高性能なマシンビジョンが必要となります。また、AIプログラミングはアプリケーションごとに異なることから、すべての農業アプリケーションの開発をサポートするプラットフォームも必要です。くわえて、作物の成長や時間の経過に伴う障害物の位置の変化により、環境も変わってくるため、車両の物理を厳密に定義しなければなりません。

Cognataのプラットフォームは、次のエンドツーエンドの固有の課題に対処できます。
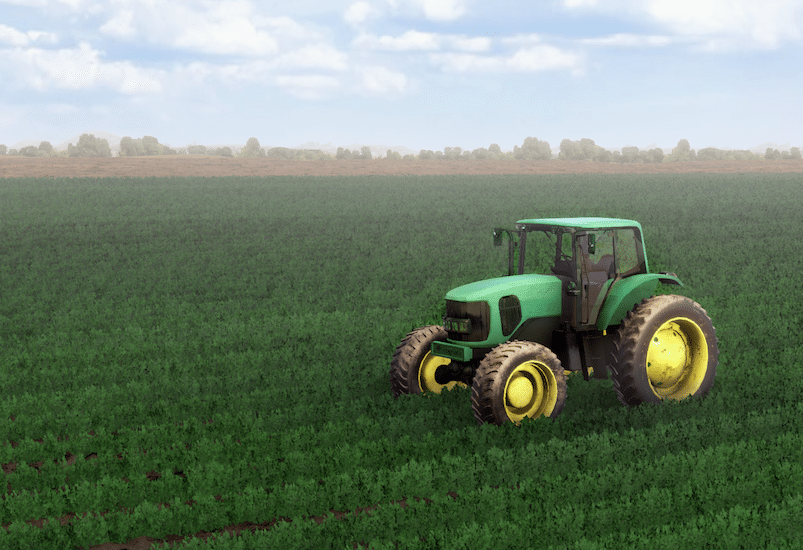
運転可能な経路の特定から障害物や困難な道路状況の対策まで、オフロード走行をトレーニングおよび検証できるように設計された包括的な3D環境を用意しています。
また、特別な農業トラフィックエージェントを用いた豊富なアセットカタログを作成し、顧客のユースケースを完全にエンドツーエンドで実装するための顧客固有の3Dアセットをインポートできるようになりました。
