- ProductsIndustries
- IndustriesIndustries
- COMPANYIndustries
- NEWSROOMIndustries
- CAREERSIndustries
Menu
Cognata’s AV off-road simulation is designed to test, train and validate perception and control challenges for terrains that do not offer a clear road definition.
This simulation platform uses synthetic data with a digital twin environment, and delivers a new level of realism in training and validating agriculture robots
and automated machines.
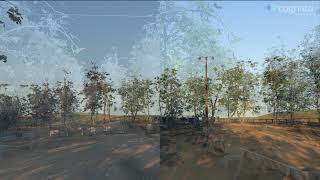
Agricultural automated robotics machines require enhanced machine vision for recognition, segmentation, localization, and tracking. As AI programming differs for each application, there needs to be a platform that supports development for all agricultural applications. A growing and moving environment and hidden obstacles change the terrain and give rise to the need for an accurate vehicle physics definition.

Cognata’s platform addresses the unique challenges from end to end:
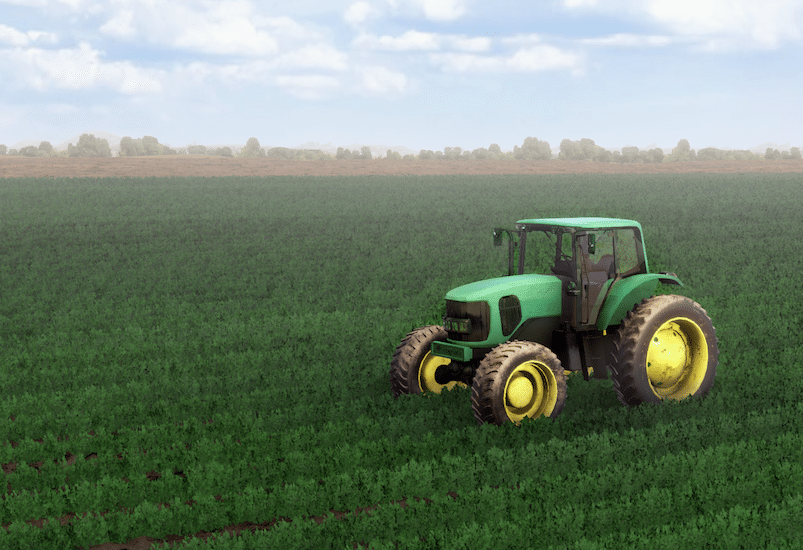
We have created comprehensive drivable 3D environments designed to train and validate off-road driving from identifying a drivable path to overcoming obstacles and difficult road conditions.
We have also created a rich assets catalog with special agriculture traffic agents and have enabled importing customer-specific 3D assets, for full end-to-end implementation of the customer use-case.
