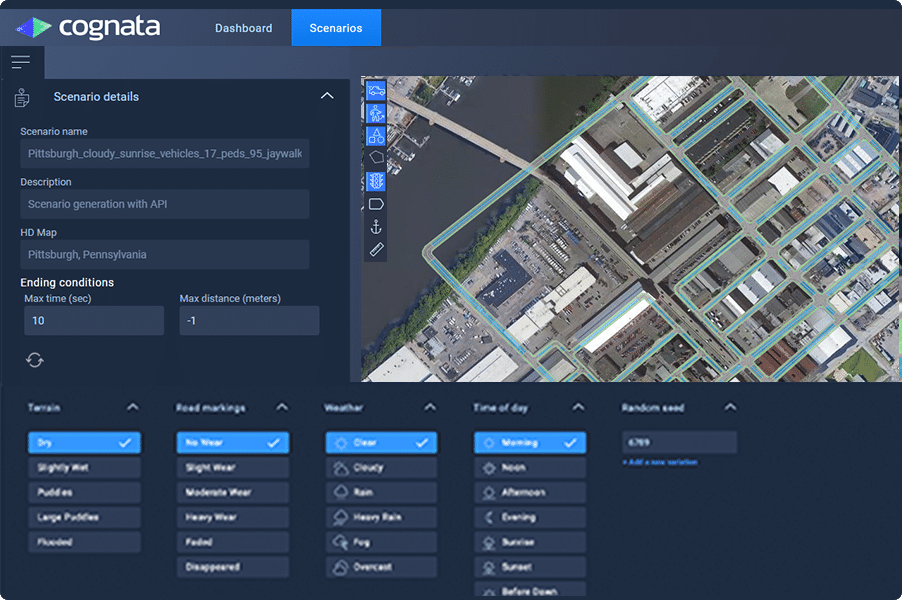
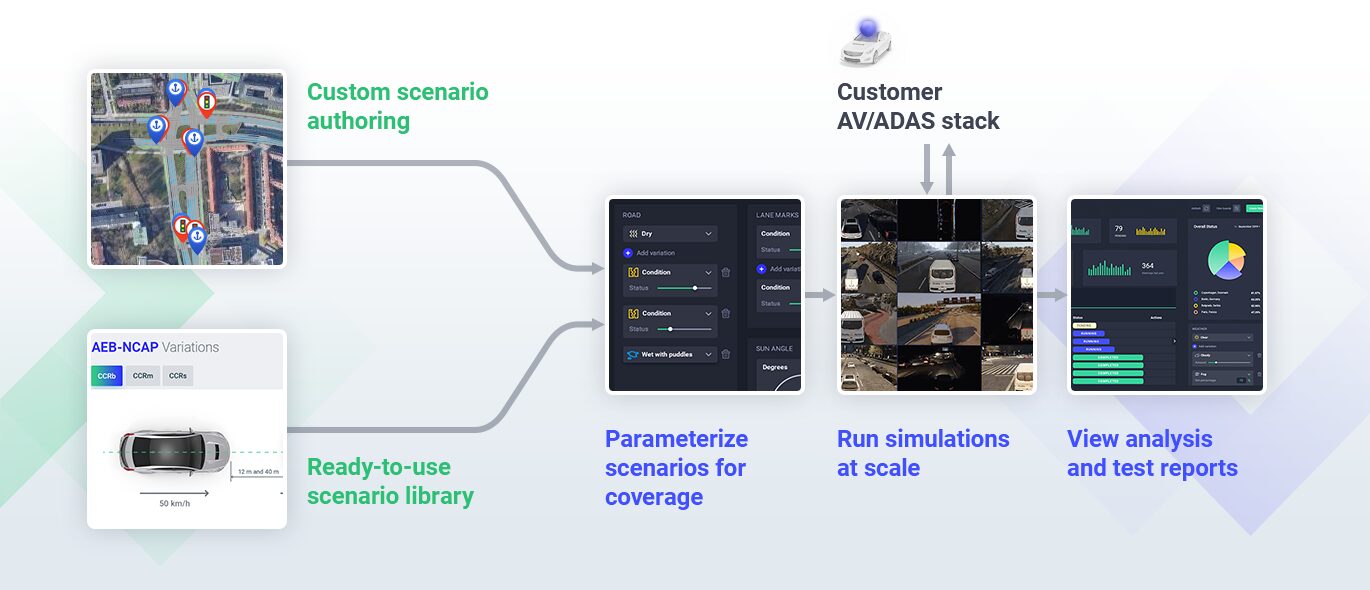
확장성과 탄력성이 뛰어난 Cognata의
클라우드 역량은
대규모 시나리오의 생성을 간소화합니다.
Cognata의 공통 표준 시나리오
라이브러리에서 바로 시작하거나 Cognata
Studio UI 및 ASAM OpenSCENARIO® 스크립팅
기능을 사용해 맞춤형으로 생성할 수
있습니다.
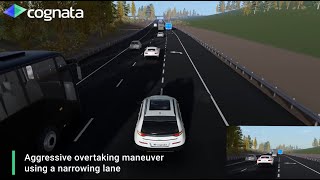
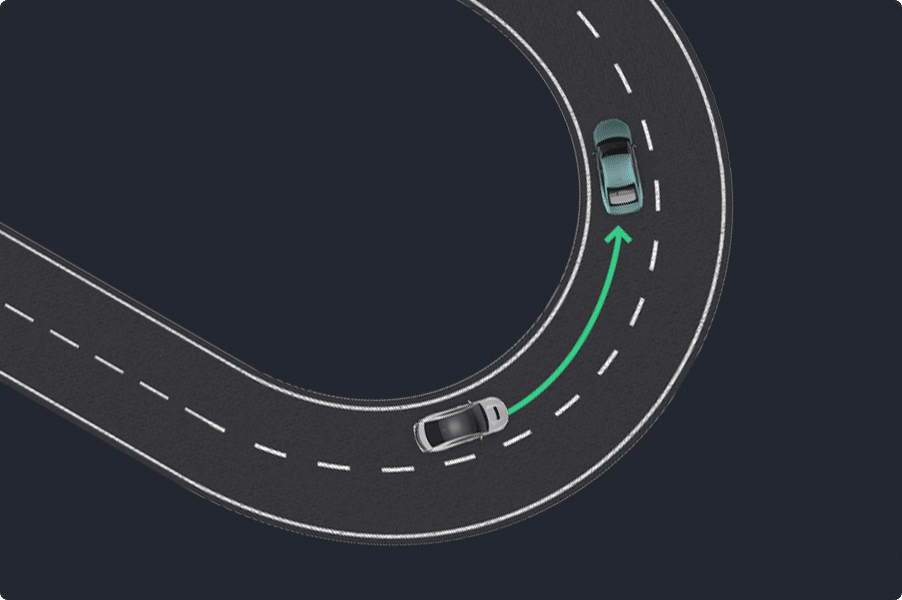
고속 주행: 회전 시 차선 유지
Cognata의 차량 물리학에서
자율주행 차량 속도에 따라
차량과 노면 사이의 마찰력이 변화하면서 제동
반응이 뚜렷하게 달라집니다.
같은 시나리오를 나란히 비교한 그림에서
고속 주행 중인
자율주행 차량이 급회전 시 차선을 유지하려고 할 때
특정 속도 매개변수 적용 시 테스트에 통과한
반면 다른 속도 매개변수의 기준은 통과하지
못하는 것을 확인할 수 있습니다.
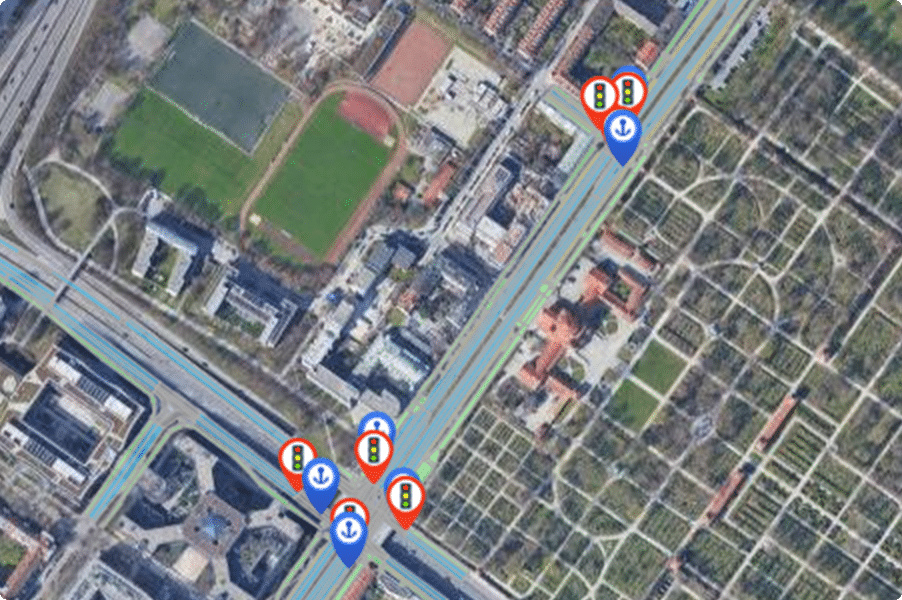
정차 구역: 보행자 및 인접 차선 차량 감지 AEB
Cognata의 고급 인식 훈련에 따른
의사 결정이 시나리오의 최종 결과에 영향을
미칩니다.
같은 시나리오를 나란히 비교한 그림을 보면
제동 결정까지의 1초 차이로 결과가 바뀝니다.
이 정차 구역 시나리오에서
자율주행 차량이 인접 차선 차량과 충돌하여
차량이 안전 구역의 사전 설정된 성공 기준을
통과하지 못하는 것을 확인할 수 있습니다.