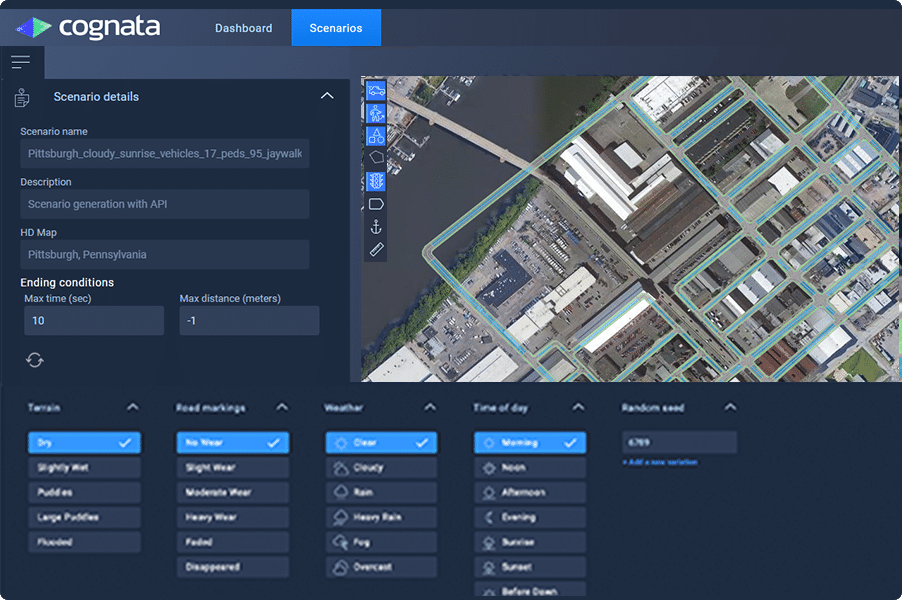
Cognata のクラウドストレージはスケーラブ
ルで伸縮性が高いことから、大規模なシナリ
オの生成が簡単です。
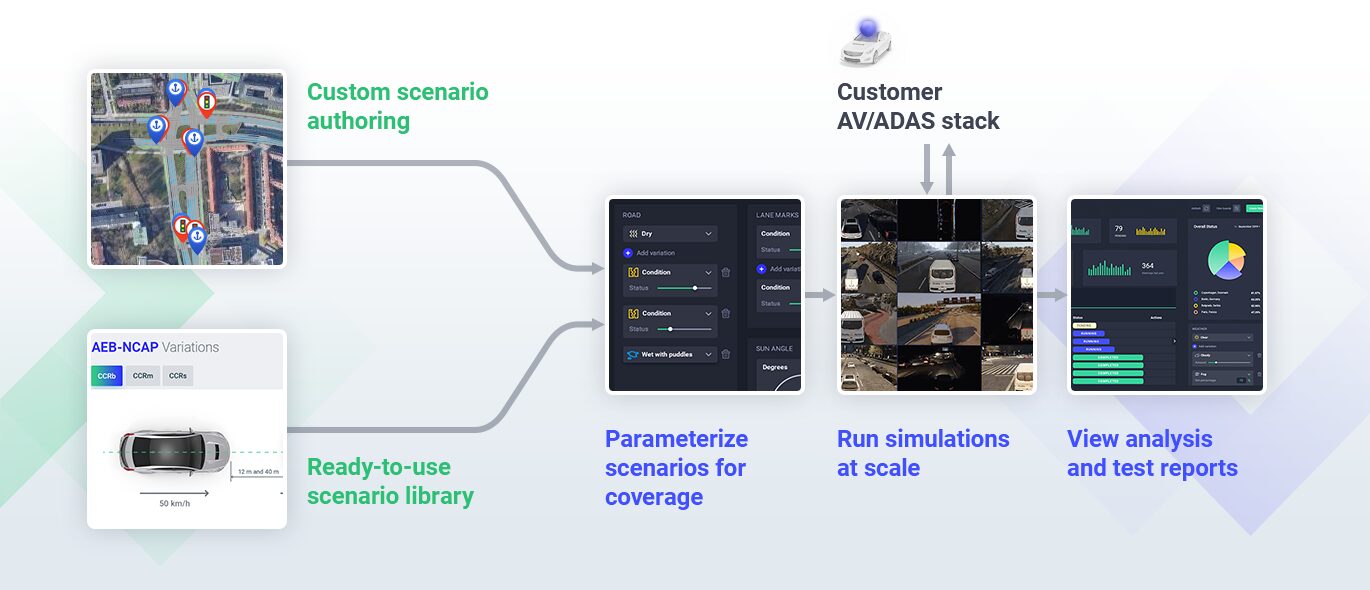
すぐに使い始められる一般的な標準シナリオ
のライブラリを用意しているだけでなく、
Cognata Studio UI および ASAM OpenSCENARIO®
スクリプト機能を用いて独自のライブラリを
作成することも可能です。
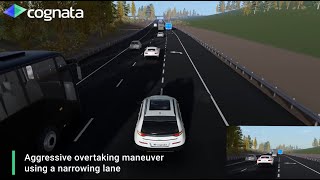
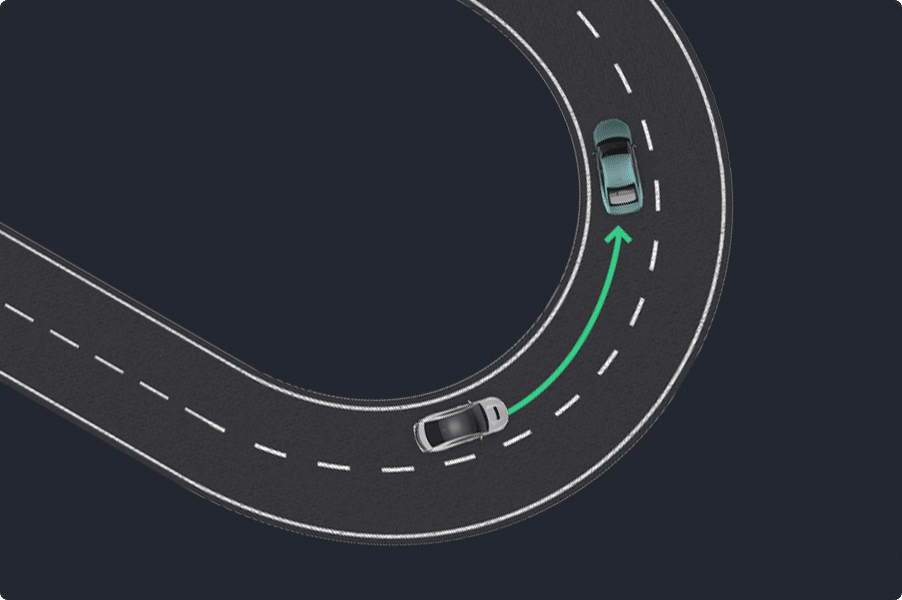
高速道路:ターン時のレーンセンタリング
Cognata の車の物理では、
自動運転車両の速度が異なる場合、
それに伴いアスファルト表面と車の摩擦が変
化します。
同じシナリオ内の高速道路環境で
並行 (Side-by-Side) ビューを使用すると、
自動運転車両が急カーブした時でも車線の中
心位置を
維持しようとしているのを確認できます。
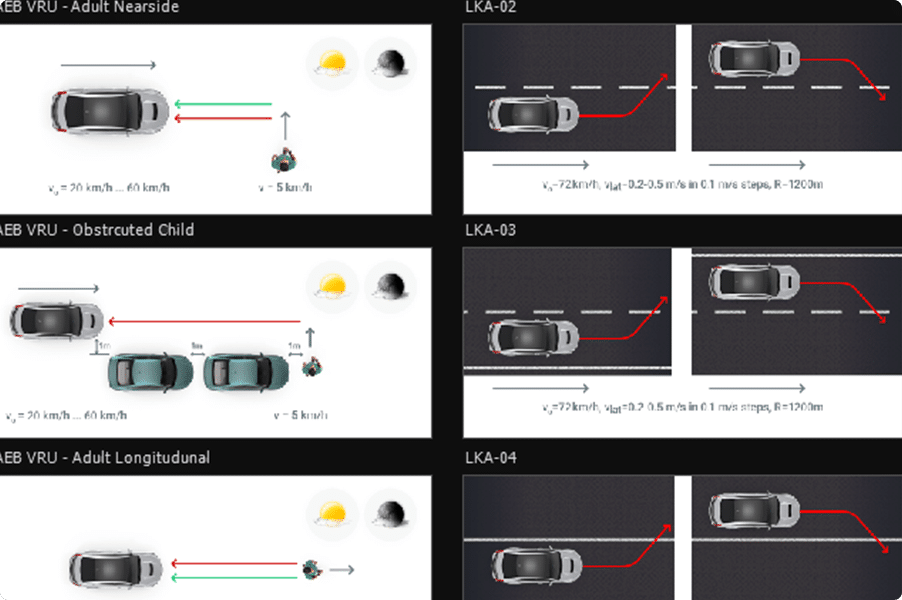
駐車場:道路を横断する歩行者とレーンに近い
車両を AEB に用意
Cognata の高度な知覚トレーニングにより、
意思決定がシナリオの最終結果に影響を与えます。
同じシナリオ内のこの並行ビューでは、
意思決定のタイミングが 1 秒ずれただけでも
結果に違いが発生します。
また、この駐車場のシナリオでは、
自動運転車両がレーンに近い車両と衝突しており、
事前に設定された安全ゾーンの成功基準を満
たしていないことが確認できます。